The undergraduate projects in mechanical engineering program promote project-oriented learning in which students work in teams or individually. Students generally begin with a conceptual design, analyze, simulate, and fabricate a product. In addition to product development, students can alternatively choose to address a research question of their interest. In third year, students have an opportunity to put the knowledge acquired during their first four semesters (e.g. workshop practice, experimental methods, data analysis, machine design & prototyping, engineering machines) into practice through individual projects lasting a semester.
Final year projects span about two semesters, and students generally work together in teams from the initial idea through to a fully-functioning prototype. These predominantly industry-inspired final year projects help student develop their technical, design, teamwork, financial planning, management and marketing skills. In both third and final year projects, students acquire the necessary knowledge either through individual study, attending courses, or discussions with their supervisors.
Highlights of selected recent projects
Pipe cleaning & flaw detection robot
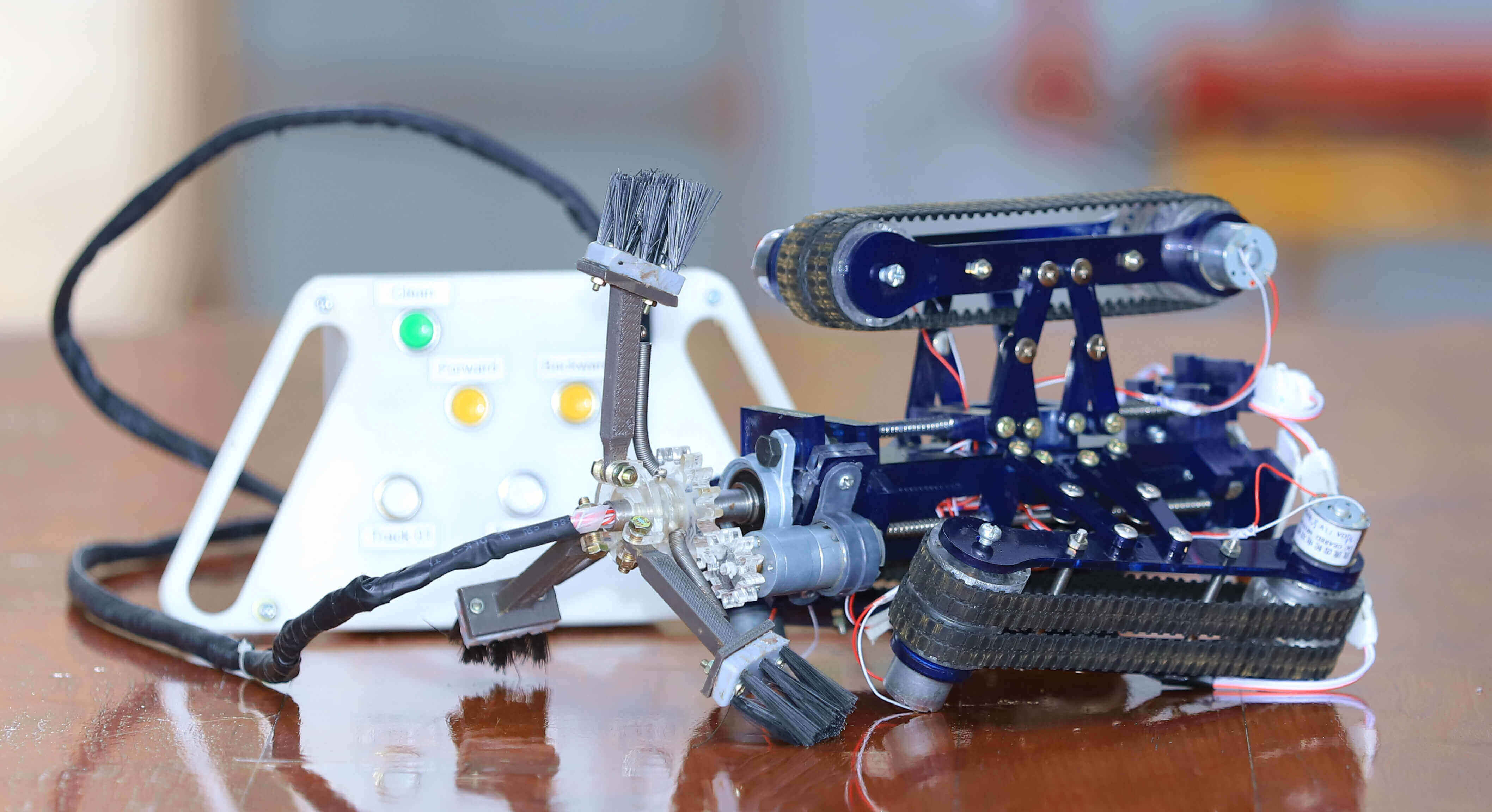
The purpose of the pipe cleaning & flaw detection robot is to inspect and identify flaws and to clean deposits in industrial pipe systems. Mobility of the robot is gained with the aid of three rubber belt tracks. Each rubber track is attached to the robot with a foldable linkage in a way which the diameter of robot can be adjusted automatically according to the diameter of pipe wall. Each rubber track is powered by a geared DC motor. Robot has the ability to move through both horizontal & vertical pipelines. Also robot has the ability to move through varying diameters & bends. Pipe walls are inspected visually using a camera. Deposits detected through inspection are cleaned by the cleaner mechanism, which is attached to the rear section of the robot. This project was funded by Prof. S. Mahalingam project fund. The video demonstration (how the device is in action) is here
Delta robot mechanism for automated eddy current NDT testing
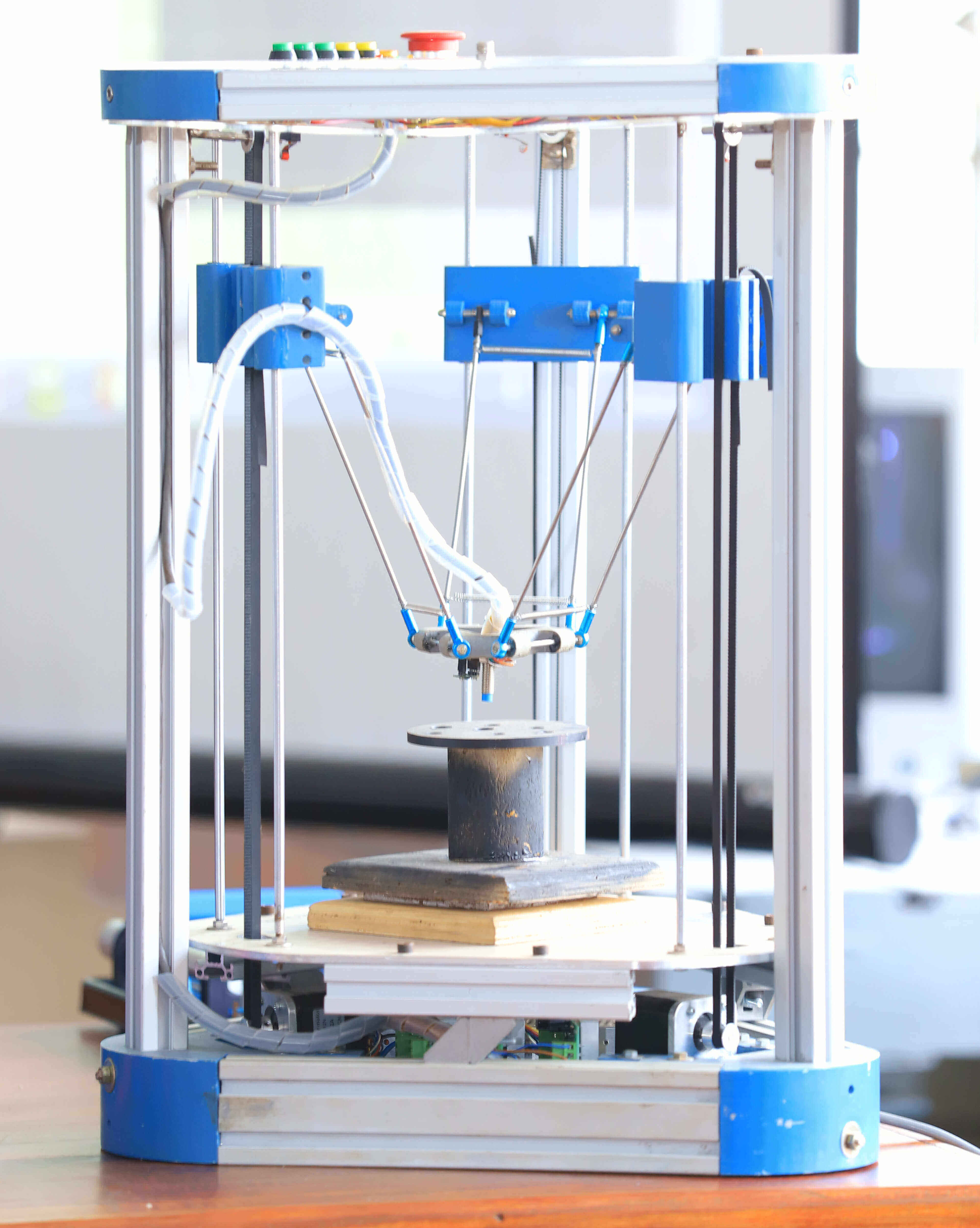
The most popular non-destructive testing (NDT) method used in the industry today is the eddy current NDT method. But testing is done manually by moving the testing probe over the surface area of the specimen checking through a monitor. Due to that reason, this procedure is user dependent and time consuming. This project uses a delta robot to identify the type of surface of NDT testing. Then, it decides the path that should follow to cover the practically possible area. Afterwards, a probe which is connected to the end effector of the delta robot cover the specimen area uniformly and plot the surface area highlighting the cracks in a GUI interface. This can be used to identify cracks in real time when used in a production line. Hence it is very effective method for quality control. This project was funded by Prof. S. Mahalingam project fund. The video demonstration (how the device is in action) is here
Soil waste screener for tile industry

Manufacturing of tiles is one of the prominent industries in the world. Roof tiles, floor tiles and many types of tiles are being manufactured at present. “Rajarata tiles” is one of the prominent factories of DSI group, engaged in tile industry. This project titled, “Soil waste screener for tile industry” is done as a solution to the problem of removing the impurities of the clay used in the manufacturing process. Removal of the impurities has been done with human labor which is an inefficient and costly procedure. The solution provided in the project was, breaking the clay into smaller pieces as possible using small scale forces such that the impurities in the clay would not undergo any deformation. A crusher and a sieve mechanism was suggested for this. Building the crusher to meet the above needs is the main task since the sieve mechanisms are already available. Deciding the blade profile for the crusher was done during the second half of the project. A device (a test bench) was developed to test the blade profiles and a profile that has best characteristics were determined under certain conditions. This project was funded by Prof. S. Mahalingam project fund.
Can the walking cadence reduce the Diabetic Foot Ulceration (DFU)

Due to the lack of insulin production or the body cells not being properly receptive to the insulin can cause sugar levels in the bloodstream to increase. This metabolic disorder is called diabetes. Since the normal healing process is being disrupted due to high blood sugar levels, poor circulation, immune system deficiencies, it may take a considerable amount of time for a wound to properly heal. The feet as the most common area to be wounded easily, this project primarily focused on Diabetic Foot Ulcers (DFU). Not giving proper care can even lead to amputation. Thus, the major purpose of this investigation is to understand whether the change of walking cadence can reduce the risk of diabetic foot ulceration. This project was funded by Prof. S. Mahalingam project fund.
Project Funding
Prof. S. Mahalingam Project Fund
Financial assistance provided by the immediate family members of Prof. S. Mahalingam under the coordination of Ms. Sakthy Selvakumaran for undergraduates projects in recognition of Prof. Mahalingam's dedicated service to the Mechanical Engineering Education in Sri Lanka.
Prof. S. Mahalingam Endowment Fund Award
Awarded for the best final year student project related to applied mechanics and its advances such as mechatronics in recognition of Prof. Mahalingam's dedication to advance applied mechanics education and establish the Applied Mechanics Laboratory at the Faculty of Engineering, University of Peradeniya. The financial support is provided by Dr. Tilak Peiris and Ms. Nimala Peiris, through PEFAA.